
3D Model Re-projection
Computer Vision course project - An implementation of EPnP algorithm and application on 3D re-projection
Project Proposal
After seeing the ’Building Rome in a Day’ demonstration in the first lecture of Computer Vision class, we developed great interest in the topic of 3D reconstruction. The conceptual implementation process is fluently organized yet too complicated for our project as a whole. It takes different images of the same object, detects points of interest, finds matching point pairs, calibrates camera positions from where the images are taken, therefore calculates point information in 3D space and builds 3D model of the object. Among the steps mentioned above, camera calibration of all input images is the basis of the 3D reconstruction and its accuracy largely influence the overall performance. So we decide to dig into this part and do some analysis. To simplify, we assume that all cameras have the same intrinsic matrix, therefore the it becomes the well-known ’Perspectiven-Point’ problem. We want to look into one or several different algorithms of PnP problem, and analyze their accuracy, speed and sensitivity.
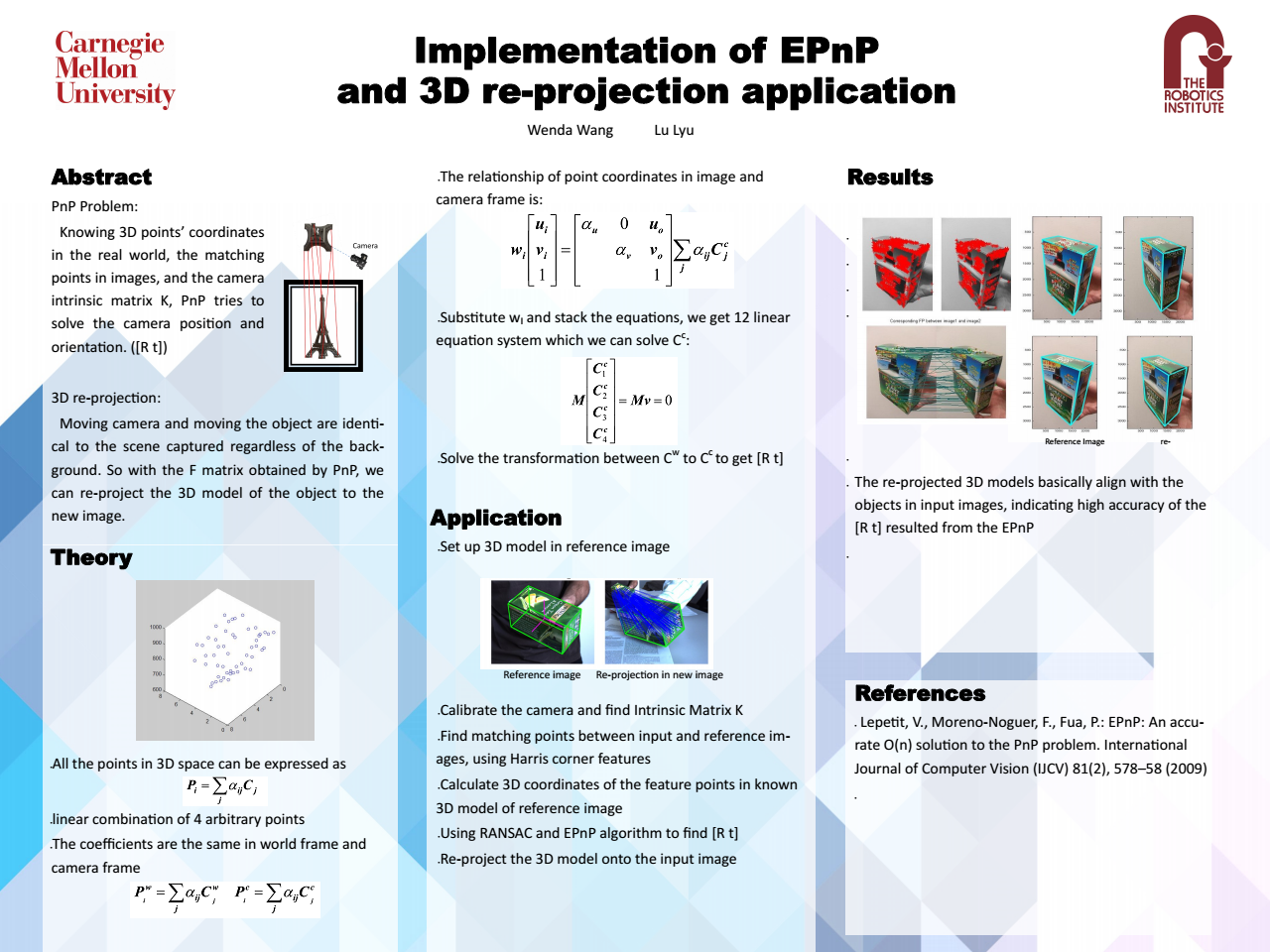
Project Poster